| (ア) |
ネットワークシステム技術 (PDF) 株式会社国際電気通信基礎技術研究所、株式会社東芝 |
| |
| ネットワークを介して複数の異種ロボットを協調的に動作させるために、エージェント技術をベースとしたロボット間協調言語・プロトコルの開発、ロボットリモート制御技術の開発、およびセマンティックWebサービスに基づくロボットサービスの動的な発見・合成技術を研究開発しています。現在までに,モバイルエージェントを用いた複数ロボットの連携や、オントロジーを用いたサービス検索エンジンを試作しました。 |
|
| (イ) |
ロボットプラットフォーム構築技術 (PDF) 日本電信電話株式会社 |
| |
複数の様々なタイプのロボットを結びつけ、各ロボットが収集した情報を蓄積・統合・処理すると共に、提供しようとするサービス(ミッション)を実行するためのロボット制御情報の配信のために、ネットワークロボット・プラットフォームを研究しています。
図は、「ネットワークロボット・プラットフォーム」のアーキテクチャを示します。このプラットフォームにより複数の色々なタイプのロボットを協調・連携させることにより、前述したような様々なサービスやアプリケーションの実現を狙っています。 |
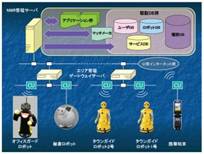
図.ネットワークロボットのアーキテクチャ
<拡大図はこちら> |
|
| (ウ) |
行動・状況認識技術 (PDF) 株式会社国際電気通信基礎技術研究所、三菱重工業株式会社、松下電器産業株式会社 |
| |
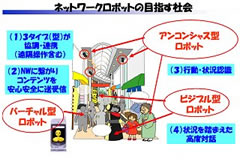
ロボットが人と適切かつ自然な対話行動を行おうとすると、人はどのような行動中なのか、人を取り巻く環境はどのような状況なのかを知る必要があります。
行動・状況認識技術では、多くの人が行きかう公共の場で、天井や壁に埋め込まれたロボット(アンコンシャス型ロボット)を含む色々なロボットが協調・連携して、人の行動や周囲の状況を認識する技術を研究しています。 |
|
| (エ) |
ロボットコミュニケーション技術 (PDF) 株式会社国際電気通信基礎技術研究所 |
| |
| ロボットとネットワークを利用して人と自然なコミュニケーションを実現するための情報支援や、人の誘導等を実現する技術を研究しています。 ロボットは、音声発話だけでなく、人間に似せて作られているロボット身体を利用した動作(手を上げる、アイコンタクトなど)や、自律的な移動ができます。そこで、これらを活用して、人に尋ねる感覚でロボットとの対話やコミュニケーションができる技術の実現を狙っています。 |
|