採択事業 岩見沢市
高精度測位やビッグデータを活用したネットワークロボットに関する地域利活用モデル実証事業
ネットワークロボット(UAV、自律型農作業機器)とのビッグデータ連携により、基幹産業である農業の振興のみならず、災害時等における市民の安心安全の確保に資する。
実証地域
北海道岩見沢市、秋田県大館市、鹿角市
実現するモデル
- (2)先進的・先導的なG空間利活用モデルの確立に関する実証事業
- 4.高精度測位やビッグデータを活用したネットワークロボットに関する実証事業
構築したシステムの説明
本実証事業では、多様なG空間情報等のビッグデータ(あるいはオープンデータ)の集約、情報共有を可能とする「地域環境情報システム」、そこに集積される情報の複合的な解析と解析結果の幅広い利活用を可能とする「情報利活用支援システム」、及び準天頂衛星システムの利活用を見据えた「測位情報配信システム」を構築しました。集積された情報は「情報送受信システム」によりネットワークロボットに送信され、ビッグデータ解析情報、高精度測位情報に基づく自律的稼働を実現しています。さらに、ネットワークロボットが取得した新たなG空間情報は、「地域環境情報システム」に送信され全体が発展していく仕組みです。具体的には、実証地域である北海道岩見沢市、秋田県大館市・鹿角市の主要産業である農業に着目し、ネットワークロボット(UAV、自律型農作業機器)による営農作業のデモを実施しました。また、除排雪車への応用も検証を終えており、今後、農業の発展や地域住民の安全・安心向上の実現を目指して行きます。
- 実証事業の概要(全体構成図)
-
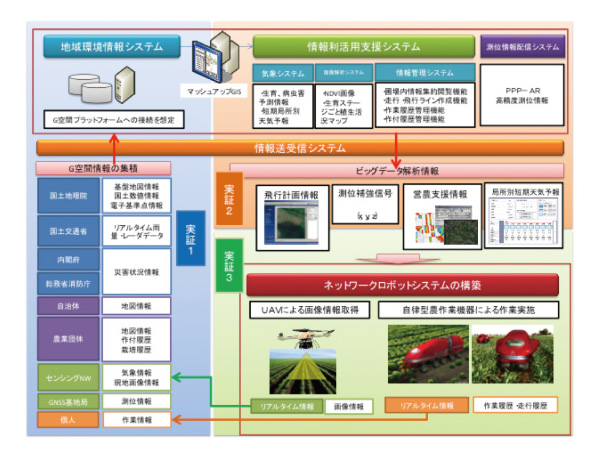
多様なG空間情報を集積した地域環境情報システム、これら情報の複合的解析や利活用を可能とする情報利活用支援システム、準天頂衛星システムに対応した測位情報配信システム等がネットワークロボットの自律的稼働を実現。
- 自律型農作業機器の自動走行
-
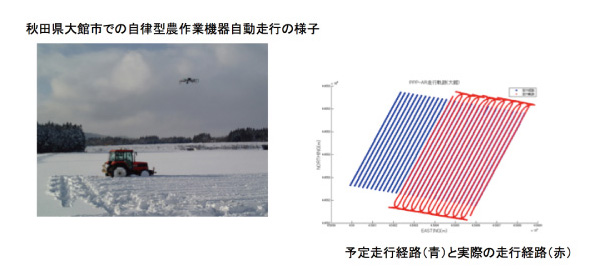
予めUAVが高精度の圃場画像情報を取得し、このデータに基づき自律型農作業機器が自動走行。予定された走行経路と実際の走行経路の誤差は10cm以内。
活用するG空間技術、G空間情報
- マッシュアップGIS
- UAVが取得した画像の解析
- 測位情報配信システム
- ビッグデータ解析
- ネットワークロボット制御
実施団体
- 北海道岩見沢市
- 秋田県大館市
- 秋田県鹿角市
- 北海道大学
- 酪農学園大学
- 秋田職業能力開発短期大学校
- いわみざわ地域ICT(GNSS等)農業利活用研究会
- あきた北農業協同組合
- かづの農業協同組合
- 一般社団法人北海道総合研究調査会
- 日立造船株式会社
- 株式会社はまなすインフォメーション
- 有限会社アグリウエザー
- ダットジャパン株式会社
- イーサポートリンク株式会社
- 株式会社スマートリンク北海道
- 株式会社東光ホールディングス
インタビュー
北海道大学大学院農学研究院教授
野口伸さんに聞きました
1990年3月、北海道大学大学院農学研究科博士課程修了。北海道大学農学部助手、助教授等を経て、2004年より、北海道大学大学院農学研究科教授。専門は、生物環境情報学、農業ロボット工学。
- 今回、G 空間シティ構築事業に提案した背景を教えて下さい。
-
日本全体で農業が曲がり角に差し掛かっている状況にあると認識しています。理由としては、就農者の人口が減っている、そして高齢化が進んでいる、その一方でTPPが妥結に向けて今議論が進んでいるという状況です。ですから科学技術立国としての日本の高い技術力を使って、農業を再生し、強い農業基盤の構築が必要と思います。具体的な技術としてG空間を活用する、G空間データに基づいた新しい農業技術が非常に重要だと感じています。今回の実証事業では情報の連携や有効活用に向け、ビッグデータの集積や解析・共有に関わるシステム構築を行い、複数のネットワークロボット(UVA、自律型農作業機器)を組み合わせ解析された情報を元に、高精度測位情報を用いてより知能的に稼働させます。これにより生産性の向上と地域の安心・安全対策に取り組んで行きたいと思います。
- 事業におけるアピールポイントをお教え下さい。
-
人手不足・高齢化のために人に代わる新しい労働力が必要であり、ロボットトラクターという技術に取り組みました。ロボットが自分の位置を認識しその位置に基づいて行動し、農作業を行います。特に、今回は準天頂衛星システムをうまく活用することがポイントです。現状、ロボットトラクターをきちんと作業させようとした場合、非常に高い測位精度(cm級精度)が要求され、地上に基地局設置が必要になります。しかし、基地局はユーザーが設置しなければならず、非常にコストがかかってしまいます。そのため、例えばロボットを導入したい地域があっても、基地局がなく高精度測位が実現できずにロボットを使えないということになります。この問題の解決策として今回取り組んだのはPPP-AR 測位方式です。すなわち、遠く離れた基地局を活用することで、基地局がない地域が高精度測位サービスを利用でき、ロボットによる農作業ができるようになるというシステムです。
- 実証内容についてご説明下さい。
-
各自治体に経済的な状況、予算の優先順位があると思いますし、基地局を建てたいという意見があっても実現しない場合もあるかもしれません。そのときに隣の地域、もしくはかなり離れた地域にある基地局から高精度測位の情報を得ることによって、同じように設備がない地域でも高精度測位を実現し、それが実際の農作業ロボットに適用できるということが実証できたのはメリットがあると考えています。昨年12月、秋田県の大館市、鹿角市でUAVによる試験飛行、地点測量及びGCP設置、ロボットトラクターによる無人での走行実証を行いました。基地局というインフラがない地域で、高精度測位を実現してロボットで農作業を行わせることが可能かどうかという点に着目しました。測位がどの程度の精度で実現できるのか、どこに問題があるかということを検証するため、季節はずれていますが、冬の雪の中で実験しました。北海道岩見沢市にある基地局から350km位離れた地域で、ロボットをどの程度の精度で走らせることができるのか、どこに問題があるかということをはっきりさせるということが今回の実証の目的でした。今年3 月には雪割り作業を岩見沢市でも行います。
- 今後の取組予定や期待を教えてください。
-
今回のコンソーシアムを核として、関連機関と協議しながらICTを使った日本の農業のあるべき姿を示して行きたいと思います。例えばロボットとICTを同時に利用することで相乗効果を図り社会実装を目指していきたいと思っています。今後も個々のサブシステムを進化させていき、2020 年の東京オリンピックに向けて社会実装できるように、産学官で連携しながら発展させていきたいと考えています。
ページトップへ戻る

