
(2)オートノマスカー(自動走行車)
ア 注目されている背景
現在普及している自動車は、運転に際してハンドルやアクセル、ブレーキ等を人間が操作する手動運転車である。これに対し、車内外の環境・状況を計測するセンシングや情報通信・車体制御等の技術を組み合わせ、運転者が直接操作することなく、行き先の指示等に基づき、自動車自身が道路状況に合わせて安全に目的地へ向かうオートノマスカー(自動走行車)に注目が集まりつつある。その背景としては、以下の各点を挙げることができる(図表4-1-2-7)。
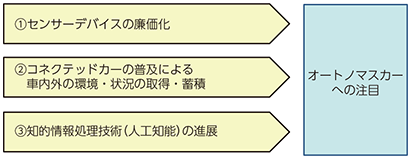
第1に、車内外の走行環境をモニタリングできるセンサーデバイスの廉価化が進んでいることである。
第2に、インターネット通信が可能なコネクテッドカーが普及したことにより、計測された車内外の環境・状況が自動走行の判断に必要な情報として取得・蓄積されるようになったことである。
第3に、センサーデバイスから取得した情報を処理し、クルマの進路変更や障害物の回避など知的な情報処理を行うAI(人工知能)が進展していることである。
オートノマスカーの定義(範囲、段階等)や実用化の方法等はいまだ確立されておらず、世界的にも研究開発が進められている段階であるが、技術的な実用化の方法として大別して以下の2方式が考えられている。
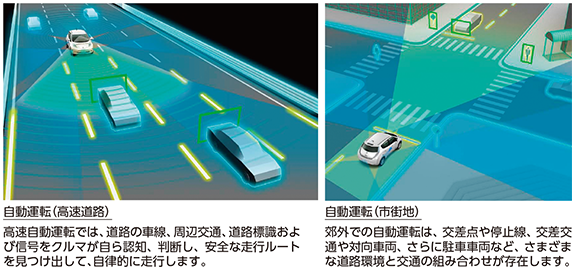
第1に、自律型のオートノマスカーである。自動車に搭載したセンサーやカメラなどで周囲の状況を計測・認知して走行する仕組みであり、自動走行に必要な全てのデータを車だけで収集し、どこでも自動走行ができることを目指すものである。
第2に、協調型のオートノマスカーである。自動車に搭載したセンサーでは捉えきれない情報を、道路に設置した路側システムや、周囲を走行する自動車や歩行者等と通信して取得し、走行する仕組みである。
以下では、オートノマスカーに関する自動車メーカーやICT企業等の取組状況を紹介する。
イ 各社の取組状況
(ア)トヨタ自動車
トヨタ自動車では、交通事故ゼロ、環境負荷低減、活力ある高齢化社会の実現を目指し、自動走行技術の開発を進めている。同社では、自動走行技術の研究から生まれる次世代の高度運転支援システムAHDA(Automated Highway Driving Assist)の開発・実用化を進めている(図表4-1-2-8)。

AHDAは、先行する車両と無線通信で情報を交換して追従走行する「通信利用レーダークルーズコントロール」と道路の白線などをセンサーで検出し、最適な経路の走行を支援する「レーントレースコントロール」との連携により、安全運転の支援や運転負荷の軽減を行うものであり、同社では、2010年代半ばの商品化を目標としている(図表4-1-2-9)。
同社は、2014年8月に、安全な次世代モビリティ社会の早期実現に向けて米国ミシガン州のToyota Technical Center内に設置されている「先進安全技術研究センター」に3,500万ドルの新規投資を行うことを発表しており、自動走行技術や先進安全技術の研究の取り組みをより一層推進することとしている8。
(イ)本田技研工業
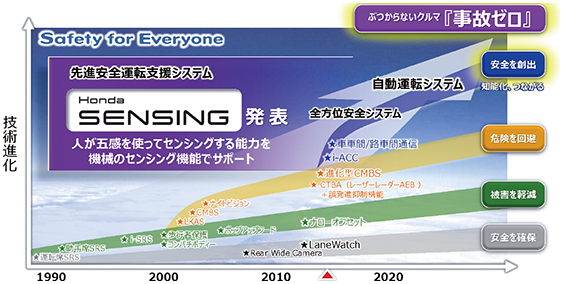
本田技研工業は「Safety for Everyone」をスローガンに、道を使う全ての人が安心して暮らせる「事故に遭わない社会」を目指し、事故ゼロの交通社会の実現に向けて取り組んでいる(図表4-1-2-10)。
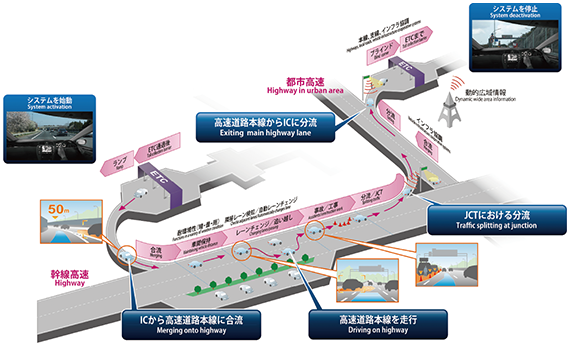
同社は、2014年9月に米国で開催された「第21回ITS世界会議 デトロイト2014」に出展し、全方位安全システムと自動運転システムの通信技術の公開を行った。
全方位安全システムについては、自動車と歩行者/自転車間通信(V2P/B9)、自動車と二輪車間通信(V2M10)の通信技術を含む(V2X11)市街地での全方位安全運転の実演を行った。また、自動運転システムについては、デトロイト市の環状高速道路(約12.8km)を使用し、実際の交通環境下におけるハンドル操作、自動ブレーキ、合流・分岐・車線変更などを可能にした自動運転走行の実演を行った。
また同社では、2014年10月には事故の未然防止と回避をサポートする、先進安全運転支援システム「Honda SENSING」を発表した(図表4-1-2-11)。
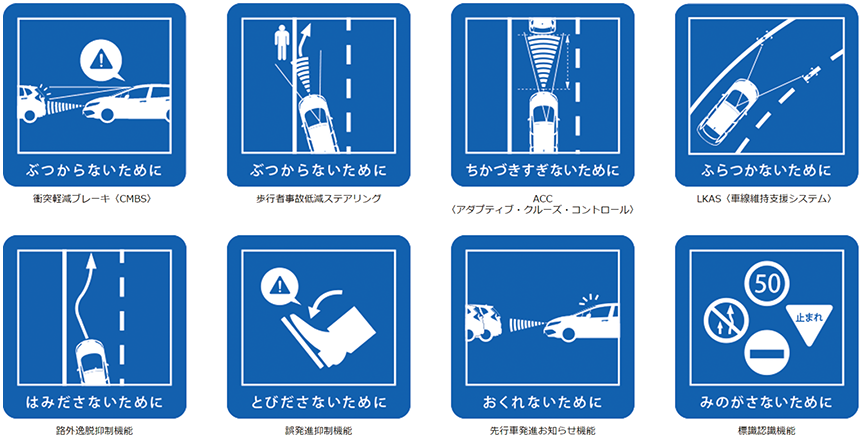
これは、ドライバーの安全、安心を支援するための先進運転支援技術や自動走行技術を幅広く研究開発してきた従来の機能に新たに6つの機能を追加するものであり、自動車の前方だけでなく側方や後方を含め、対象の位置や速度を検知するミリ波レーダーや対象の大きさや形状を識別する単眼カメラからの情報を使った全方位センシングにより、より精度の高い認識を可能とするものである。
具体的には、前走車との車間距離と速度差を検知し車間距離を維持する「渋滞追従機能付きACC(アダプティブ・クルーズ・コントロール)」や、前走車、対向車、歩行者との衝突を回避支援するため、自動でブレーキをかける「衝突軽減ブレーキ(CMBS)」などの機能を備えている。
(ウ)日産自動車
日産自動車は2013年10月に開催されたCEATEC Japan 2013において、自動走行技術のデモンストレーションを実施した(図表4-1-2-12)。デモンストレーションで実演された技術は、同社の電気自動車「日産リーフ」に5つのレーザーと5つのカメラを搭載し、周囲360度の走行状況をリアルタイムで把握し、人工知能が「周囲の車両の動きを読む」ことで、その状況に応じた適切な行動を取ることができるものである。

2015年3月にスペイン・バルセロナで開催されたMWC2015(Mobile World Congress 2015)において、社長兼最高経営責任者であるカルロス・ゴーン氏は、同社におけるオートノマスカーの開発・投入スケジュールについて、2016年に交通渋滞時における自動走行、2018年に高速道路における自動走行、2020年に市街地における自動走行を実現していくことを発表した(図表4-1-2-13)。
同社は、2015年1月に、アメリカ航空宇宙局(NASA)と「自動運転システムの発展、および、同技術の商業的応用を目指し、共同で研究・開発を行う5年間のパートナーシップを締結した」と発表しており、このパートナーシップにより、2020年に向けた段階的な自動走行技術の開発を推進していくこととしている。
(エ)アウディ
アウディは、2014年7月にはフロリダ州タンパで公道走行実験を行い、2014年10月にはホッケンハイムのグランプリコースで時速200km/hを超える無人高速自動走行実験を行うなど、自動走行の試験を繰り返し実施している(図表4-1-2-14)。また、2015年1月に開催された「2015 International CES」では、シリコンバレーからラスベガスまでの約900kmを自動走行のみで走行するデモンストレーションを実施した。

同社は、2015年3月に行われた年次記者会見報告において、2017年までにドイツの高速道路、アウトバーンでの時速60km/h以下の渋滞時における自動走行技術の実用化を進め、同社の最上級モデルAudi A8にその機能を搭載する予定であると発表した。
(オ)ダイムラー
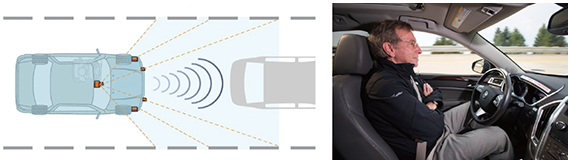
ダイムラーは2013年8月に、メルセデス・ベンツの「S 500 INTELLIGENT DRIVE リサーチカー」による自動走行での長距離走行実験を実施した。この実験は、高価なセンサーや通信などの特殊技術ではなく、量産段階に近い技術を用いて行われ、都市間及び市街地ルートにおける自動走行の実現可能性を実証した(図表4-1-2-15)。

同社では、2015年頃にオートパーキング、2020年頃に高速道路での自動走行、2025年頃に複雑性の高い自動走行を実現することを目指している。
(カ)BMW
BMWは2011年には最新のレーダー技術やカメラ、センサーなどを採用し、高速道路において約5,000kmに達する走行テストに成功しているほか、前方車両に追付いた場合には、交通法規を遵守し、車両の追越しを行う技術を開発している。
また、2015年1月に開催された「2015 International CES」において、スマートウォッチと連動した自動走行システムのデモンストレーションを実施しており、自動車を降りた後にスマートウォッチを操作するだけで、自動的に駐車可能スペースを探索し駐車を行うリモートガレージパーキング機能が紹介された(図表4-1-2-16)。

2015年6月には、この機能を搭載した車両を発表している。同社では、2020年までに、車両の周囲360度を検知し、衝突防止機能等を搭載したオートノマスカーを実用化することを進めている。
(キ)GM
GM(ゼネラルモーターズ)では、カメラによる画像情報や位置情報などをベースにオートクルーズと車線維持機能を組み合わせて自動走行を可能にするスーパー・クルーズ(Super Cruise)と呼ばれるシステムの開発を進めている。これは、高速道路、交通渋滞中、長距離運転において、ドライバーの負担を緩和することを目的としたものである12(図表4-1-2-17)。
2014年9月に開催された「第21回ITS世界会議 デトロイト2014」において、同社CEOのメアリー・バーラ氏は、2017年から、同社キャデラックの一部車両において、スーパー・クルーズやWiFi対応の車車間(V2V)通信システムといった「インテリジェント&コネクテッド車両技術」の提供を開始する予定であると発表した。
(ク)Tesla Motors
電気自動車専門の自動車メーカーであるTesla Motorsは、2015年3月に同社の製品の1つであるモデルSに自動走行機能を搭載した(図表4-1-2-18)。これにより、道路上の車線境界線が明瞭な幹線道路であれば、ハンドル操作を行わずに走行することが可能となっている。
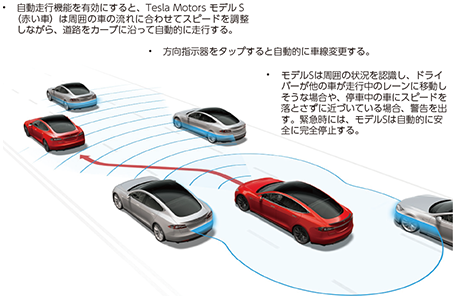
同社の自動車では、ソフトウェアのバージョンアップにより、様々な機能を追加することができ、2015年3月に公開された最新バージョン(ver6.2)では、障害物に接近した際の自動緊急ブレーキ、ブラインドスポット等からの衝突に対する警告機能等が追加された13。今後開発・実用化される新たな自動走行技術についても、ソフトウェアのバージョンアップにより新型車でなくても利用可能となる予定である。
(ケ)Google
Googleでは、DARPA主催の技術コンテスト(Urban Challenge)に参加したスタンフォード大学の技術者を招聘し自動走行技術の研究開発を進め、2010年にその開発コンセプトを発表し、同年から米国での走行実験を進めている。
同社のオートノマスカーは、車両に設置したセンサーから得られた情報を解析し、周囲の状況等に応じてコンピュータが操作を行う運転制御ソフトウェアを搭載しており、車両上部に搭載したレーダーが物体との距離や性質を測定したデータ等にもとづき、車両周辺の詳細な3Dマップを作成する。車両前方にはステレオカメラ、車両前方・後方にレーダー、車輪に位置測定のセンサーなどが設置されており、自らの位置を正確に把握した上で、それを同社の高精度地図情報に重ね合わせることで、どの車線が安全に走行できるかの判定や、横断歩道や交差点の位置の特定等を行っている(図表4-1-2-19)。

同社によると、2014年12月に、オートノマスカーのプロトタイプを開発し、2015年夏頃からは米国カリフォルニア州マウンテンビュー周辺において公道実験を開始する。公道実験は、安全確保のためにドライバーが同乗し、最高速度を時速25マイル(時速約40km)に制限した上で行われる予定である。
ウ オートノマスカーの利用意向
(ア)オートノマスカーの利用意向
以上のように、各社がオートノマスカーの実現に向けた取組を活発化しているが、実際に消費者からはどの程度利用が期待されているのだろうか。
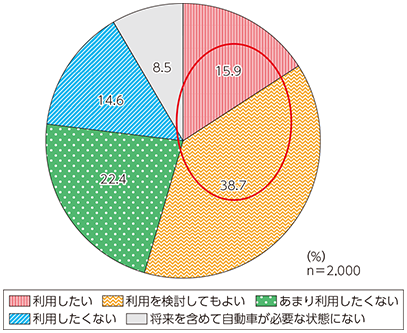
アンケート調査では、オートノマスカーを「行き先を登録するだけで、レーダーやセンサー等で周囲の環境を認識して自律的に走行し、最適な道を選択して目的地まで行ける自動車」と説明した上で、その利用意向を尋ねた。
その結果、「利用したい」あるいは「利用を検討してもよい」と回答した人は54.6%と半数を超えた(図表4-1-2-20)。
人々の意識に関する調査研究」(平成27年)
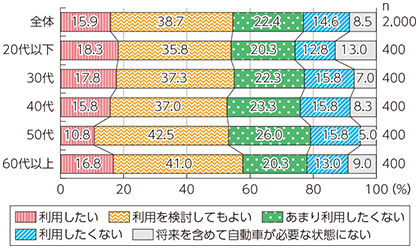
利用意向を年代別に見ると、「利用したい」あるいは「利用を検討してもよい」と回答した人は60代以上が約6割と最も多く、運転の労のない移動手段としてシニア層から高い期待が寄せられていることがうかがわれる(図表4-1-2-21)。
人々の意識に関する調査研究」(平成27年)
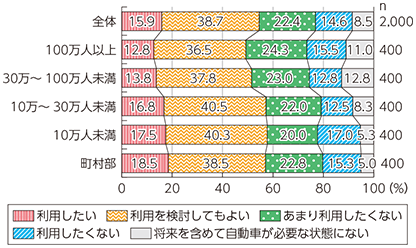
利用意向を地域別に見ると、「利用したい」あるいは「利用を検討してもよい」と回答した人は人口10万〜30万人未満の都市部、10万人未満の都市部、町村部ではいずれも6割に達し、100万人以上の都市部、30万〜100万人未満の都市部(同5割)に比べて多くなっている。人口規模が小さく公共交通網が大都市ほど充実していない地方部で、オートノマスカーへの期待が高いことがうかがわれる(図表4-1-2-22)。
人々の意識に関する調査研究」(平成27年)
(イ)オートノマスカーを利用したくない理由
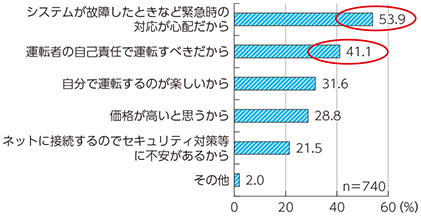
オートノマスカーについて「あまり利用したくない」あるいは「利用したくない」と回答した人を対象に、利用したくない理由を尋ねたところ、「システムが故障したときなど緊急時の対応が心配だから」が53.9%と最も高く、次いで「運転者の自己責任で運転すべきだから」(41.1%)となった(図表4-1-2-23)。やはり、オートノマスカーが消費者に受け入れられるためには、安全面での懸念を払拭することが重要であることがわかる。
人々の意識に関する調査研究」(平成27年)
8 トヨタ自動車ホームページ、http://newsroom.toyota.co.jp/en/detail/3932689![]()
9 Vehicle-to-Pedestrians/Bicycle
10 Vehicle-to-Motorcycle
11 Vehicle-to-X
12 ただし同社では、「スーパー・クルーズ」が量産車として利用可能になった場合でも、交通、天候及び車線の見える範囲のような外部要因に基づいてシステムの制限があるため、ドライバーの注意が必要であるとしている。また、車線がない場合や信頼できるデータがない場合、ドライバーが車をコントロールするようにシステムから要請される仕様となっている。
13 Tesla Motorsプレスリリース、http://www.teslamotors.com/sites/default/files/tesla_model_s_software_6_2.pdf![]()