
(2) 車とICT
自動車におけるICTの導入例として、過去からある代表的なものは我が国のITS60成功事例として世界にも知られているカーナビゲーションシステムやETC等であるが、海外自動車メーカーをはじめ更なる付加価値向上のため、コネクテッドカーとも呼ばれる車に情報通信機能を持たせスマートフォンやタブレット連携を強化させるなど新たな車のICT化も加速している。
また、この分野にはAppleなどの車が本業ではなかった上位レイヤー企業も新たな事業領域拡大を視野に参入してきており、昨今注目を集めているGoogleをはじめ我が国でも自動車メーカー各社において導入や実験を進めている各種運転支援システム・自動走行等もセンサー技術や情報処理性能等のICTの進化が背景として挙げられるところである。
以下では、これら車とICTにおける昨今の動向及び各社の取組について紹介する。
ア 車とICT化の進展
現在の自動車におけるICT活用として一般の運転者にも見える形で、我が国において広く実用化されている代表例としては、カーナビゲーションシステム(以下、カーナビ)やETCが挙げられる。
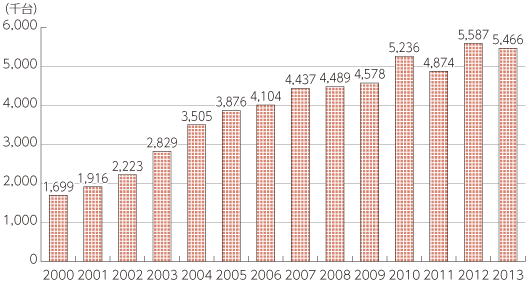
1980年代から徐々に普及をはじめたカーナビは、1990年にGPSが搭載され、自車位置の精度を向上させた。その後、1996年にはVICS61とよばれるサービスにより道路の混雑状況が車内でも把握できるようになり、2002年には通信モジュールを搭載したカーナビも登場し、2013年の出荷台数は546.6万台に達し(図表4-1-3-22)、現在では7割程度の乗用車にカーナビを搭載されている62。
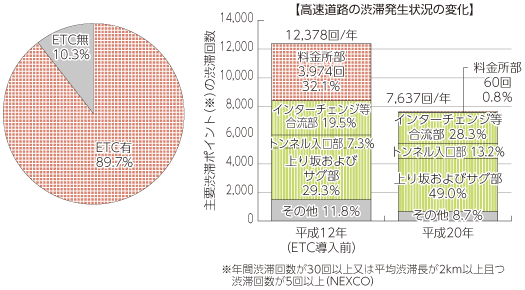
また、高速道路におけるETCの利用状況も2014年3月現在約9割に達しており、高速道路渋滞の一番の原因であった料金所の渋滞は、ETC導入によりほぼ解消したとされ、運転所要時間の短縮と同時にCO2削減等でもICTが貢献しているところである(図表4-1-3-23)。
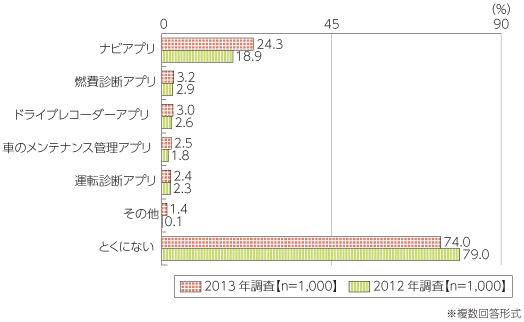
一方、第3章1節1項でも述べたスマートフォン等の普及に伴い、多様なアプリの利用も進んでおり、ナビゲーションアプリもその一つである。運転支援におけるスマートフォンアプリの利用調査によると、2013年の国内運転者の約24%がナビアプリの利用経験があり、車内でもスマートフォンが利用されるようになっている(図表4-1-3-24)。
このように、自動車におけるICT活用は、カーナビ等の自動車側からのアプローチとスマートフォン等のICT側からのアプローチが交差する状況となっており、今後、ますます両者が融合、発展していく様相を見せている。
イ 海外におけるコネクテッドカー・IVIの進展
車のICT化としてあげられる、通信機能を自動車に持たせたコネクテッドカーやIVI64は、おもに欧米の高級車を中心に広がりを見せている。2014年1月の米国ラスベガスで開催されたCES65においても欧米自動車メーカーが大規模なブースを構え、その注力度合いが見て取れる状況となっている。また、自社の車載アプリの開発環境(SDK)をアプリ開発会社に提供し、彼らがアプリを開発できる環境整備を進めることで、積極的に開発者を囲い込もうとする戦略もうかがえる。
A 米国 GM
北米で発売するGMの車種には、基本的に全車種対象としてOnStarとよばれるテレマティクス機能が搭載されている。同社では衝突事故自動通報、ロードサービス、盗難車両支援などのサービスを究極のテレマティクス・サービスと位置づけ1996年から提供しており、インフォテインメント機能として「MyLink」と呼ばれるスマートフォンとの連携機能を2012年から提供している。アプリケーションは、パートナーシップを組んだサードパーティで開発されたものを、OnStarのクラウド環境66を経由して、車載機と連携する仕組みとなっている(図表4-1-3-25)。
GMでは、2014年夏に2015年モデルの一部の車種からLTEによりMyLinkの高速化を図り、アプリケーション提供をAppShopを通じて展開するとともに、2015年からHTML5アプリケーションを採用すると表明している67。

B ドイツ Audi
ドイツのAudi社は、Audi connectとして2011年からコネクテッドサービスを対象に提供開始しているが、2015年春からニュースのヘッドラインやメッセージ等の読み上げ、ストリートビュー機能を拡張させたナビゲーションや車内Wi-Fiホットスポット機能など、アプリケーションの利便性を向上させた次世代Audi connectを展開することを計画している。
また、同社は2014のCESにおいて、自動車購入の際、コネクテッドカーであることが購入選定要因の2番目になったと発表しており、Audi車載用タブレット端末を2014年末〜2015年初に提供開始する予定であり、運転者や同乗者が持ち込むスマートフォン等と自動車情報との連携は本機が担うほか、HTML5でのアプリケーションも搭載するとしている(図表4-1-3-26)。

C 日本 トヨタ自動車
同社は、スマートフォンとカーナビをBluetoothで連携し、スマートフォンからカーナビの目的地を設定できる位置情報の送信を行うデンソー製アプリ「NaviCon」への対応を2010年から行っている。このようなスマートフォン連携をカーナビに取り入れることで、スマートフォンアプリの地図から周辺施設や行きたい場所を選択したり、電話帳にある住所録から選択してカーナビに送信するなど、簡易にカーナビの目的地設定を行うことが可能となっている。
また、スマートフォン連携対応アプリで見つけた場所の位置情報を受け取ってカーナビに送信したり、スマートフォン側の地図を操作して、カーナビの地図を動かしたりすることも可能となっており、ユーザーはスマートフォンで事前に検索操作ができるので、車内に乗り込んでからの検索操作の時間を短縮できることから、現在では日産、ホンダなど、トヨタ車以外のカーナビにも採用されている。

D Apple 「Apple CarPlay」、Google等 「OAA」
OTTとよばれる上位レイヤー企業も自動車産業に急接近している。2013年6月にAppleはiPhoneを車載機に接続して利用する仕組み「Apple CarPlay(発表時当初はiOS in the Car)」を発表し69、2014年の一部車種より、音声通話やSiriを活用したナビゲーション検索、音楽再生等の機能が予定されている(図表4-1-3-28)。

また、Googleについても2014年1月にAudi、GM、本田技研工業、Hyundaiなどの自動車メーカーとOAA70と呼ばれる業界団体を結成し、CarPlayと同様にスマートフォンを車載機に接続してスマートフォンアプリの車内利用を促進させることを目指している(図表4-1-3-29)。

このようなコネクテッドカーやスマートフォンやタブレット連携強化の背景としては、1つはスマートフォン等のデバイスを自動車に持ち込めるようにすることで、図表4-1-3-24にあるアプリを運転中でも利用したいとする消費者のニーズに応える動きである。
2つ目は、スマートフォンのビジネスモデルを参考にした事業変革である。自動車用アプリの浸透は車用のアプリケーション等ソフトウェア開発の短期間化・低コスト化に繋がるため、これまでのような買い切りモデルでは自動車の買い替えサイクルが数年に及ぶことから購入した時点の車用アプリが陳腐化する可能性が高いが、利用者がアプリを選択できるようになると常に新しいアプリを利用できるようになる。また、アプリ市場へ展開することによる新たな収益モデルの構築や、利用者との接点拡大に繋げ自動車メーカーの事業性を向上することも期待される。
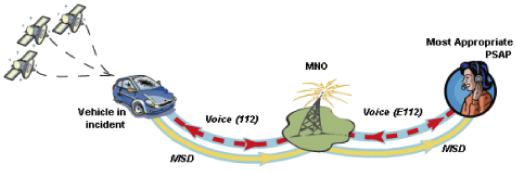
3つ目としては、諸外国でのテレマティクス義務化があげられ、欧州及びロシアにおいては、eCall緊急通報システム72やブラジル等の新興国での盗難車両追跡機能73による義務化が進められており、その他の国でも同種の民間サービスとして提供され始めている。eCall緊急通報システムとは自動車での衝突事故が発生した場合、車両に搭載されたシステム(IVS74)により手動あるいは自動で緊急通報が発呼され、音声並びに車の各種情報(MSD75)がネットワークを介し、事故現場に最も近い緊急応答センター76に接続する仕組であり、これにより救命率の向上を目指している(図表4-1-3-30)。
ウ ITS・安全運転支援システム
(ア)我が国の交通事故の状況
我が国の平成25年中における交通事故による死者数は、4,373人で13年連続の減少となっている(図表4-1-3-31)。しかしながら、交通事故死者数の前年比減少率は0.9%にとどまり近年は減少幅が逓減し、死者数の指標となる致死率78についても平成22年以来3年ぶりに0.53%から0.56%と増加に転じるなど、死者数が減りにくい状況となっており、その背景としては、高齢者人口の増加、シートベルトやエアバッグ等の装着率の頭打ち、飲酒運転による交通事故の下げ止まり等が挙げられている。
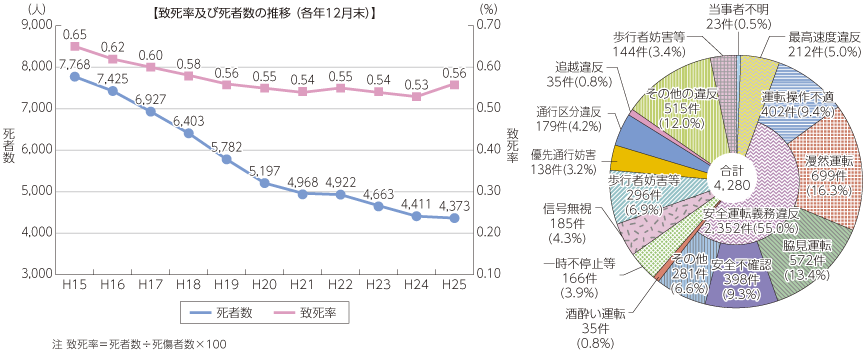
また、交通事故死者の内訳を見てみると、安全運転義務違反(運転操作不適、漫然運転、わき見運転、安全不確認など)や、一時不停止、信号無視等、運転者の何等かのヒューマンエラーに起因するものが多くを占めており、これらのことから、運転者に対し注意情報を提供すること等、ITS・安全運転支援システムの導入等による更なる死亡事故ゼロに向けた取組が自動車メーカー各社をはじめ行われている。
(イ)ITSの発展
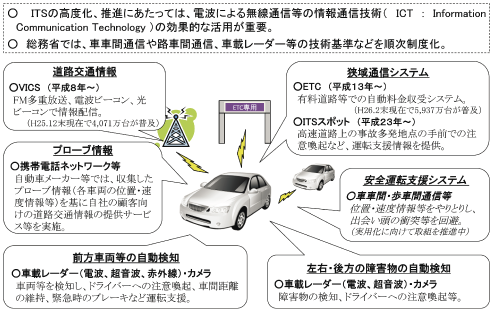
我が国のITSの研究は1970年代に研究開発がはじまり、1980年代後半から車両、道路インフラ、交通管制等個別の官民開発プロジェクトが数多く進められた79。1996年7月に策定された「高度道路交通システム推進に関する全体構想」により、VICS(1996年〜)、ETC(2001年〜)等今ではごく普通に利用されているサービス展開が進んだ。
また、カーナビを通じた各種情報提供サービスが自動車メーカーにより提供されているが、これらのサービスは、自動車の走行位置や速度などの情報(プローブ情報)をもとに自社の顧客向けのサービスを提供している。
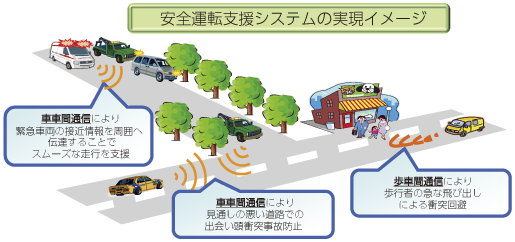
今後、自動車のセンサー(前方、後方のレーダー等)やカメラを活用して、ドライバーへの注意喚起や、出会い頭衝突回避など安全運転支援システムなど、次世代ITSの研究開発も進められている(図表4-1-3-32)。
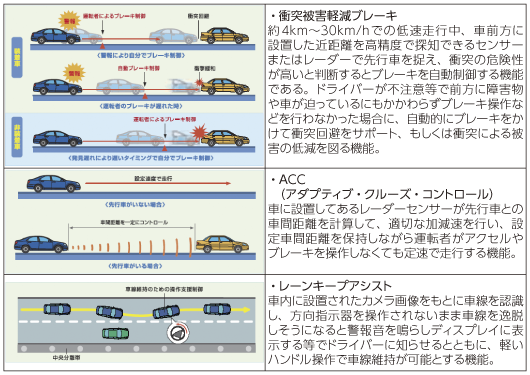
これらの安全運転機能に関しては、ここ数年で目覚しい発展を見せており、我が国においては本格的な超高齢社会を迎えるにあたり、身体的な能力が衰える高齢者ドライバーの安全運転支援は重要なテーマであり、昨今では一般個人に販売される自動車においても、以下のような安全・安心機能を盛り込んだ商品が各メーカーから販売されている80(図表4-1-3-33)。
(ウ)自動走行
また、図表4-1-3-33で挙げた運転支援技術等をさらに進化させて、ドライバーが行う知覚・認知・判断・操作の一部または全てをITS技術を用いて機械が補助・代行することで交通事故を減らそうという試みも、ここ数年で急速に注目されてきている。これは、運転における人間の関与を減らすことで、前述(ア)で述べた事故要因のヒューマンエラーを減少させ、更に交通事故を防ごうという試みである。
自動走行における技術的な観点では、一般的に信号や歩行者などがいない高速道路(自動車専用道)のほうが比較的容易である一方で、市街地の一般道など複雑な判断やハンドル操作、交通ルール等が求められる場所ほど技術的難易度が高いとされる。
A 米国Google
Google社では2009年からスタンフォード大学と共同で、自動走行技術の開発を始めており、2010年から米国で走行実験を開始している。同社の自動走行車は、センサーでとらえた情報を人工知能で解析し、安全な走行路を判定する方法を採用しており、車両上部にLidar81と呼ばれる機器を搭載し、レーザーにより物体との距離を測定することで、車両周辺の3Dマップを作成する(図表4-1-3-34)。また、フロントガラスにはビデオ・カメラが設置され、信号機、道路標識、前方の車のテールライトなどの検知を行うほか、屋根のGPSアンテナで位置を把握し、車輪の位置測定のセンサー82にて短距離の移動を測定することで正確な位置を算定している。これら各種センサーから収集した情報から、自動車の位置を正確に把握しつつ、LidarのイメージをGoogleの得意とするマップに重ね、どの車線が安全に走行できるか、横断歩道や交差点がどこにあるかなどを判定している。
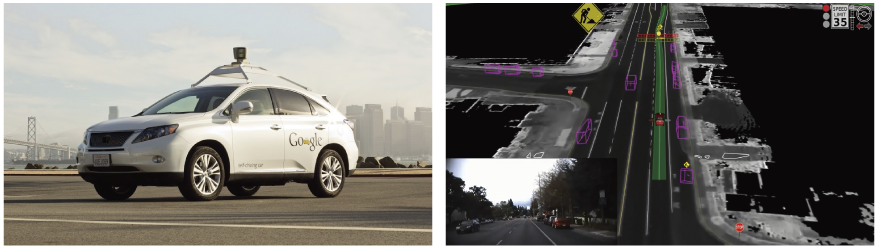
同社によると2014年4月には無事故での走行距離が70万マイル(約113万キロメートル)に達したという。
B トヨタ自動車:AHDA
トヨタ自動車は、自動走行技術を利用した高速道路(含む、自動車専用道路)における次世代の高度運転支援システムAHDA83を開発している。AHDAとは、先行車両と無線通信しながら追従走行する「通信利用レーダークルーズコントロール」と、全車速域で道路の白線などをセンサーで検出し、あらかじめ算出された最適なラインを走行するよう操舵を支援する「レーントレースコントロール」との連携により、安全運転の支援や運転負荷の軽減を行うものである(図表4-1-3-35)。

同社は、運転の主役であるドライバーの意思を尊重し、クルマを操る楽しみを損なうことなく、安全・安心な移動手段を提供するため、これら高度運転支援システムの早期実用化を目指している。今回新開発したAHDAは、2010年代半ばを目標に商品化する予定であり、2013年1月に米国ネバダ州で開催されたCESに出展した実験車などを活用し、自動走行の研究を通して得られた先端要素技術や知見を利用することで、次世代の高度運転支援システムの早期実用化を推進していくこととしている。
C 日産自動車
日産自動車は、2013年8月に2020年までに同社の複数の車種において自動走行を実用化することを発表している84。
また、2013年10月に開催されたCEATEC Japan2013において、同社は自動走行のデモンストレーションを行っており、同社の「リーフ」にレーザースキャナー、アラウンド・ビュー・モニターカメラ、アクチュエーター等を搭載することで、車両の周囲360度の危険をモニターし、必要な場合にはドライバーへ警告を発し、アクションを取る機能を備えている。これは同社のセーフティ・シールド(クルマが人を守る)の考え方に基づくとしており、安全が確認されるとハンドルのほか、アンダーイルミネーションも青く光り、障害物などがあり安全が確認されるまでは赤く光るなど、運転者のほか、車の外にいる人にも自動車がどのような判断をしているか分かるようになっている(図表4-1-3-36)。

D 本田技研工業(ホンダ)
本田技研工業は、2013年10月に開催された「第20回ITS世界会議 東京2013」において、自動走行に関して2件のデモンストレーションを行った85。
一つ目が協調型自動走行で、自律型の走路環境認識技術を搭載した実験車が、狭い道などでの自動走行や、車載カメラで歩行者を認識することによる自動停止および発進するものであり、歩行者とクルマの通信や二輪車・四輪車・電動カートとの通信による安全運転支援に加え、車載カメラによる路上駐車車両を検知し、後方の安全を確認したあとに、自動で車線変更を行える。
二つ目が自動バレーパーキング86で、駐車場の四隅に設置されている監視カメラがクルマと無線通信で連携することにより、車両側に特別なセンサーを追加することなく、人がスーパーなどの駐車場の送迎エリアにクルマを停車させると、駐車場内の空きスペースの情報を受け取ったクルマが無人で走行して駐車する機能を持たせている(図表4-1-3-37)。

これら自動走行における取組はドライバーが全ての運転操作を行う運転から、自動車の運転支援システムが一部の運転操作を行う運転、ドライバーが居なくても良い昨今注目を集めている自動走行など、様々な概念が存在しているため、その自動化段階に応じ次の4つのレベルに大きく分類されている。レベル1は図表4-1-3-33の技術等により、加速(アクセル)や操舵(ハンドル操作等)、制動(ブレーキ等)のいずれかの操作を自動車側で行うことを指し、レベル2になると、それらの複数の操作を1度に自動車側で行う。そして、レベル3になるとレベル2が更に高度化し緊急時対応を除き、すべての操作を自動車側が行うようになり、レベル4に至ると緊急時対応を含め自動車側が行うものである87。

エ 政府および総務省の取組
(ア)日本再興戦略、世界最先端IT国家創造宣言及び科学技術イノベーション総合戦略
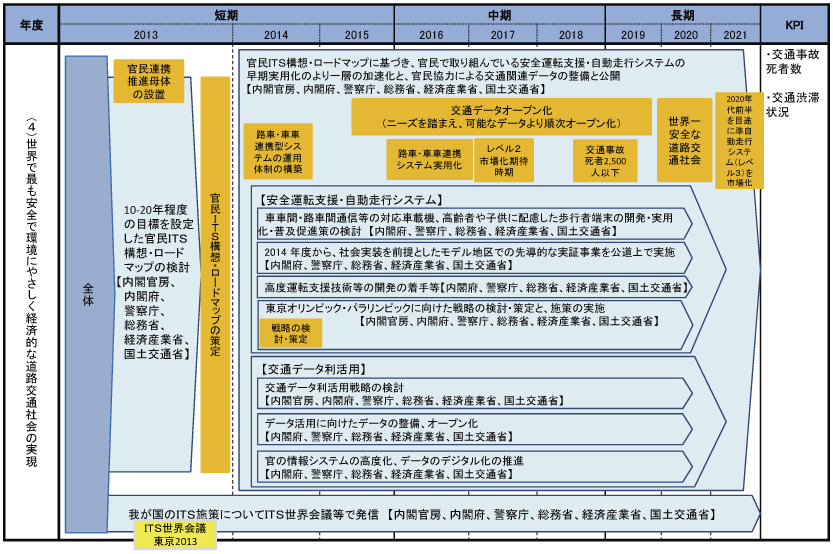
平成25年6月14日に閣議決定された「日本再興戦略」では、安全・便利で経済的な次世代インフラの構築として、「車車間通信、路車間通信等を用いた安全運転支援装置・安全運転支援システム及び自動走行システム、渋滞予測システム、物流システムの構築によるヒト・モノの安全・快適な移動の実現を国家プロジェクトとして進める」と宣言されている。
また、同日閣議決定された「世界最先端IT国家創造宣言」では、「地図情報や車・人の位置情報等の地理空間情報(G空間情報)、蓄積データを活用することなど、ITS技術の活用により、交通事故の危険や交通渋滞が回避される、安全で、環境にやさしく、経済的な道路交通社会」の実現に向けて、「2014年度から、社会実装を前提としたモデル地区での先導的な実証事業を公道上で実施するとともに、高度運転支援技術等の開発にも着手する。さらに、車の自律系システムと車と車、道路と車との情報交換等を組み合わせ、運転支援技術の高度化を図るとともに、実用化に向けた公道上での実証を実施し、2020年代中には、自動走行システムの試用を開始する。これらの取組などにより、2018年を目途に交通事故死者数を2,500人以下とし、2020年までには、世界で最も安全な道路交通社会を実現する(交通事故死者数が人口比で世界一少ない割合になることを目指す)とともに、交通渋滞を大幅に削減する」ことを目標としている(図表4-1-3-39)。
加えて、平成25年6月7日に閣議決定された「科学技術イノベーション総合戦略」では、「ITS技術の高度化による、より先進的な交通安全支援・渋滞対策技術や道路交通情報の集約・配信技術、交通管制技術、利便性向上技術の開発を推進する」と宣言されており、この取組により「歩行者・自動車双方への交通安全に係る迅速な情報提供や支援、渋滞等の削減、利便性の向上を図りつつ、交通事故死者数ゼロを目指し、世界一安全・快適な道路交通を実現する。また、鉄道等の他の交通分野においても先進技術の開発を推進する」ことを目標としている89。さらに、同戦略において記された「SIP(戦略的イノベーション創造プログラム)」は、政府の総合科学技術・イノベーション会議が府省の枠や旧来の分野の枠を超えたマネジメントに主導的な役割を果たし、科学技術イノベーションを実現するために新たに創設されたプログラムであり、「自動走行システム」がテーマの一つとして位置づけられている。
(イ)総務省の取組
A 次世代ITSの確立に向けた通信技術の実証
交通事故による死傷者数は、近年減少傾向にあるものの、依然として深刻な状態にある。安全・安心で快適な交通社会を実現するためには、既存技術を更に高度化して事故を防ぐこと等が必須であり、従来の自動車単体での運転支援に加え、車と車、車と人等をつなぐ高度な無線通信技術を活用した安全運転支援システムの早期実用化が求められている。「日本再興戦略」等の政府戦略においても同趣旨の内容が盛り込まれている。このため、総務省では、情報通信審議会からの答申を踏まえ、700MHz帯安全運転支援通信システム(車車間通信・路車間通信)に関する制度整備を行った。しかしながら、上位レイヤーの通信プロトコルについては策定されておらず、早急に検討を進める必要がある。これを受け、平成26年度より「次世代ITSの確立に向けた通信技術の実証」を実施する。
本施策では、実用環境を想定したテストコース等での実証を通じて、車車間通信技術等を活用した安全運転支援システムの早期実用化に必要となる検討課題の抽出・検証を行い、実用サービスが十分機能できるよう通信の信頼性、相互接続、セキュリティ機能を確保・考慮した通信プロトコルを策定する予定である(図表4-1-3-40)。
B 「情報セキュリティ アドバイザリーボードITSセキュリティ検討グループ」開催
総務省においてはICTを活用した安心・安全で快適な交通社会を実現するシステムであるITSについて情報セキュリティの観点から検討を行っており、平成26年から「情報セキュリティ アドバイザリーボードITSセキュリティ検討グループ」を開催している。検討グループにおいては、主に700MHz帯の周波数帯を用いた車車間・路車間通信等による協調型の安全運転支援システムの早期実用化に向けて、通信される情報の真正性・完全性・機密性が担保されるための情報セキュリティ上の要件等について検討を行っている。(図表4-1-3-41)。

C SIP(戦略的イノベーション創造プログラム)での次世代ITSにおける取り組み
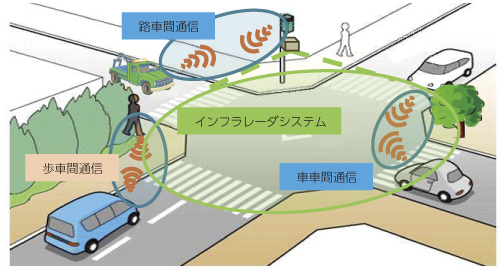
SIP・自動走行システムにおいて、総務省ではICTを活用した次世代ITSの確立を目的として、道路上での様々な交通状況においても自動走行システムの高度な安全性を確保するため、近接する車両や歩行者等の間で互いに位置・速度情報等をやり取りする車車間・路車間・歩車間通信、また、天候等、周りの環境の影響を受けずに交差点やその周辺等の車両・歩行者の存在等を把握可能なインフラレーダー等を組み合わせることにより、一般道や自動車専用道での事故回避等を図る高度運転支援システムの開発を行う開発を行うこととしている(図表4-1-3-42)。本研究開発は、2014年度〜2018年度にかけて実施されるが、実際に一般道等において、状況の異なる複数の交差点等にて多数の車載器搭載の自動車や歩行者等が行き交う環境を模擬的に設け、その中でのシステム動作等の検証を行うなど、公道実証実験を行う計画である91。
60 Intelligent Transport Systems:高度道路交通システム
61 Vehicle Information and Communication System 道路交通情報通信システム
62 マイボイスコムアンケート調査『カーナビの利用(第6回)』(2012年12月実施)より(自動車所有者におけるカーナビ搭載率は68%)。電通総研「情報メディア白書2013」では、東京30km圏では約8割がカーナビを保有。
63 http://from.sonysonpo.co.jp/topics/pr/2013/11/20131125_01.html![]()
64 in-vehicle infotainment (車載型インフォテインメント)の略。「インフォメーション(情報)」と「エンターテインメント(娯楽)」を統合した車載システム。ナビゲーション、位置情報サービス、音声通信、音楽や動画などのマルチメディア再生やインターネット接続によるニュース配信、電子メール等が利用可能な仕組み。
65 Consumer Electronics Show 毎年米国ネバダ州ラスベガスで開催される世界最大級の家電見本市
66 ATOMS(Advanced Telematics Operating Systems)
67 当初提供される予定のアプリは、ネットラジオ、ニュース、天気予報、旅行情報検索、車両情報などである。
68 http://www.chevrolet.com/impala-4-door-sedan/interior-photos.html![]()
69 http://www.apple.com/pr/library/2013/06/10Apple-Unveils-iOS-7.html![]()
70 Open Automotive Alliance
71 http://www.openautoalliance.net![]()
72 2002年3月7日公布されたEUの「ユニバーサル・サービス指令第26条」(Directive 2002/22/EC)により、EU諸国における緊急通報番号が「112」に統一されたことを背景に、検討が開始され、長年に及ぶ法制度及び技術仕様の策定等の協議・調整を経て、欧州議会(European Parliament)は、2012年7月3日、2015年から欧州内のすべての新車(M1:乗車定員9人以下の乗用車、N1:車両総重量3.5トン以下の貨物車) にeCallシステムを設置することを骨子とする「eCall」システムの導入を義務付ける決議を採択した。なお、ロシアのERA-GLONASSについては、2014年からの導入が発表されている。
73 SVT :Stolen Vehicle Tracking
74 In Vehicle System
75 MSD:(Minimum Set of Data)には、時刻情報、車両識別番号、車種、燃料種別といった車両に関する情報や、緯度経度を含めた位置情報、サービスプロバイダ識別、手動/自動発呼の識別などが含まれる。
76 PSAP(Public Safety Answering Point)
77 http://www.icarsupport.org/ecall/![]()
78 致死率=死者数/死傷者数
79 http://www.itsworldcongress.jp/japanese/citizen/about_its/learn_more/index.html![]()
80 トヨタ、日産、ホンダ等の上位車種などで導入が進んでいる。特に衝突被害軽減ブレーキに関しては、日本では軽自動車を含め多くのメーカー・車種で搭載されてきている。
81 Light detection and ranging
82 Position Estimator
83 Automated Highway Driving Assist
84 日産プレスリリース()より
85 本田技研工業(株)プレスリリース(http://www.honda.co.jp/news/2013/4131008.html![]() )より
)より
86 Valet Parking。ホテルやレストランの駐車サービスで、自分で運転してきた車のキーを係りの人に預けると代わりに車の駐車をしてくれ、外出時には車を出してくれるサービス。
87 運転支援システム高度化計画策定関係省庁連絡会議「運転支援システム高度化計画」
http://www.kantei.go.jp/jp/singi/it2/senmon_bunka/douro/dai1/siryou2-1.pdf![]() (平成25年10月)
(平成25年10月)
88 http://www.kantei.go.jp/jp/singi/it2/dai64/siryou4_2.pdf![]()
これまで、「安全運転支援システム」について、明確な定義はなかったため、一部関係者の間ではレベル2〜3までを含むものと解釈される場合もあるが、本ロードマップでは情報提供型とレベル1を「安全運転支援システム」と定義する。なお、「運転支援システム」の定義としては、従来の解釈通り、情報提供型及びレベル1〜3を指す。レベル2以上を「自動走行システム」と呼ぶのは、アクセル(加速)・ハンドル(操舵)・ブレーキ(制動)に係る複数の操作を自動的に行うことによって、一定程度の距離の走行を自動車に任せることが可能となるためである。本定義は必ずしも絶対的なものではなく、必要に応じて見直す。これについては、今後、欧州等を含む自動走行車等の定義を巡る国際的動向に日本として積極的に参加する一方で、それらを踏まえつつ、国際的整合性の観点や、技術や利用形態を巡る動向を踏まえつつ、検討することとする。 なお、これらのうち、「完全自動走行システム」とは、緊急時も含むあらゆる状況において、加速・操舵・制御を全て自動車(ドライバー以外)が運転を行うシステムであり、運転において運転者(ドライバー)は全く関与しない。したがって、「準自動走行システム」と「完全自動走行システム」では、特に制度面で大きな断絶がある。すなわち、「準自動走行システム」まではドライバーが最終責任を有するのに対し、「完全自動走行システム(レベル4)」では自動車(ドライバー以外)が最終的な責任を有することになる。
89 https://www8.cao.go.jp/cstp/sogosenryaku/honbun.pdf![]() 第2章 III. 3.
第2章 III. 3.
90 http://www.soumu.go.jp/main_sosiki/kenkyu/ictsecurity/index.html![]()
91 https://www8.cao.go.jp/cstp/gaiyo/sip/index.html![]()