
(3)電磁波センシング基盤技術
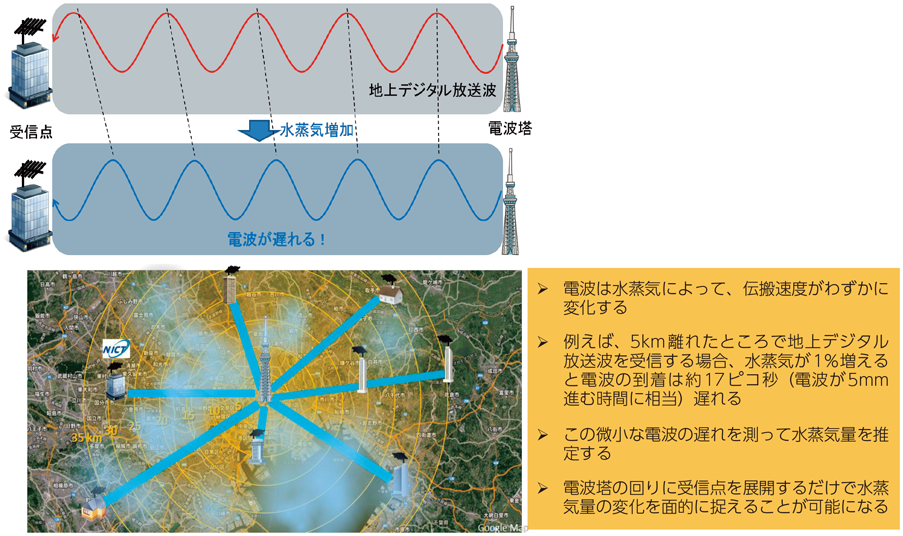
NICTでは、ゲリラ豪雨・竜巻に代表される突発的大気現象の早期捕捉・発達メカニズムの解明に貢献することを目的として、風、水蒸気、降水等を高時間空間分解能で観測する技術の研究開発を実施している。平成28年度は、大阪、神戸、沖縄に整備したフェーズドアレイ気象レーダーのデータのオープン化を進め、民間企業や自治体と連携した技術実証や評価試験を進めた。また、地デジ放送波の高精度受信から豪雨の早期検出等に有用な水蒸気量を観測する技術(図表7-6-6-2)に関しては、システムのパッケージ化、面的な水蒸気観測を目指した多点展開への取組を開始した。
さらにNICTでは、天候や昼夜によらず地表面を詳細に撮像できる航空機搭載合成開口レーダー(SAR)の研究開発を進めており、平成28年度は、海上の移動体検出・波浪計測、地表面の微小変化抽出、送電インフラの状況把握技術等の実証のためのフライト実験を実施した。また、災害対応機関へのデータ提供を目的として熊本地震被災状況の緊急観測を実施した。
この他、NICTでは、気候変動予測精度向上や大気環境診断のための衛星センサの研究開発を実施している。平成28年度は、衛星搭載ドップラー風ライダーのコア技術である高出力パルスレーザー開発において世界最高出力を達成し、その成果が国際論文誌に掲載された。また、通信/放送/測位/衛星利用などに影響をおよぼす太陽活動や地球近傍の電磁波環境などの監視を行い「宇宙天気予報」を配信している。平成28年度には、地球に大きな影響を与える太陽面爆発(太陽フレア)の発生についてAIを用いた予測モデルを開発、従来の手法に比べ飛躍的にその精度を向上させる結果を示し著名な学術誌に論文が掲載された。
政策フォーカス 自律型モビリティシステムの開発・実証
1.背景
我が国が超高齢化社会を迎え労働力不足に直面する中で、過疎地も含めた高齢者の安全・安心な生活の実現や、多様な経済活動における生産性向上の確保に向けて、ネットワークで高精度に制御する自動走行車や自律型ロボット、ドローンなどの自律型モビリティシステムの実現は、物流、観光、土木、福祉などの多様な産業において、新たなビジネス創出の強力な武器となることが期待されている。
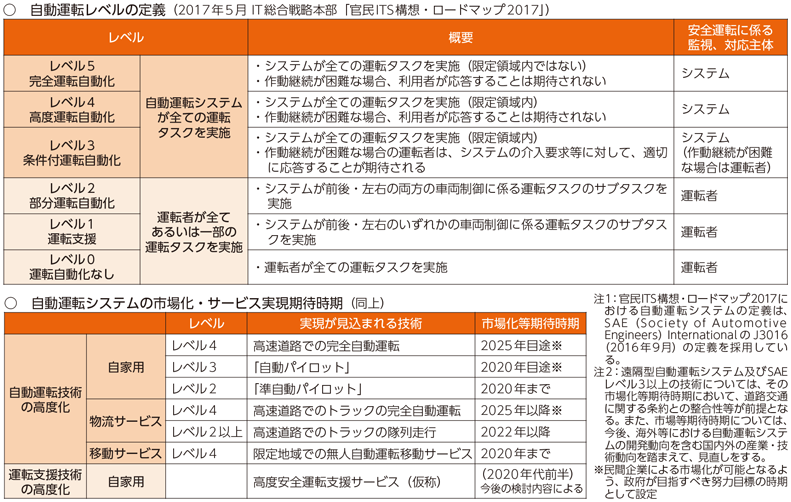
我が国を自動走行に係るイノベーションの世界的な拠点にすべく、関係府省や民間企業が分担・連携してオールジャパンで、自動走行技術の実現に向けた取組が急速に進められている(図表1)。民間側では、主要な自動車会社を含む15社の共同出資によって自動走行地図の企画会社1が2016年5月に設立された。政府側では、IT総合戦略本部等のハイレベルな場での検討が進められており、2017年2月16日の未来投資会議における「自動走行による移動革命」についての議論を踏まえ、安倍内閣総理大臣は次のように述べている。「2020年までに、運転手が乗車しない自動走行によって地域の人手不足や移動弱者を解消します。」「様々な実証走行の成果を集約し、新たな技術を踏まえた制度改革の可能性を集中的に検討するため、IT戦略本部の下で官民が対話・協力する連携体制を作ります。」
2.「新たな情報通信技術戦略の在り方」第2次中間答申
総務省は、2015年12月に情報通信審議会 情報通信技術分科会 技術戦略委員会(主査:相田仁 東京大学大学院工学系研究科教授)における審議を再開した。2016年7月、今後の経済成長・価値創造に重要な先端的IoT分野における今後の研究開発・社会実装の推進方策等を含む「新たな情報通信技術の在り方」第2次中間答申(以下、「答申」)としてとりまとめた。
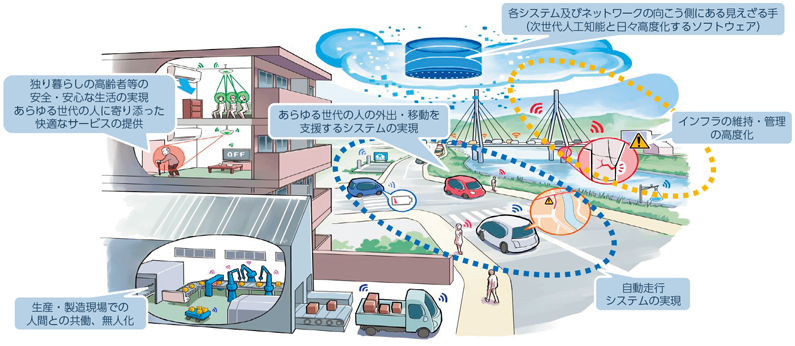
「スマートIoT推進戦略」ともいわれる答申においては、自動走行等の領域(移動系IoT)では、通信のリアルタイム性、確実性、安全性等を確保し、人々が安心してサービスを利用することが可能なIoTプラットフォームを整備することが必要であり、膨大な数のセンサーとネットワークとの間の同時接続が必要な分野やセンサーとネットワークとの間の情報のやり取りに超低遅延性が求められる分野のような先端的なIoT分野に対応可能なプラットフォームの構築を、産学官が連携して推進するとともに、先端IoTシステムの実現に必要な共通基盤技術の開発を推進することが重要であるとされている(図表2)。
3.今後の取組概要
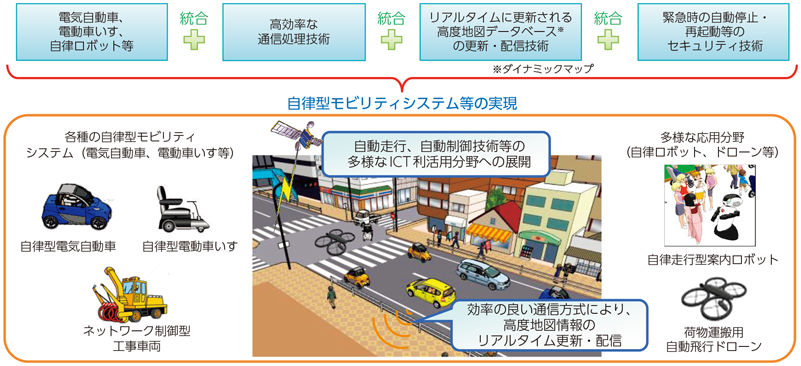
未来投資戦略2017(平成29年6月9日閣議決定)において、移動サービスの高度化に向けて、「制度・インフラ面の環境整備、研究開発等を総合的・計画的に進めるため、『官民ITS構想・ロードマップ2017』(平成29年5月30日IT総合戦略本部・官民データ活用推進戦略会議決定)を政府一体で推進する」とされているほか、世界最先端IT国家創造宣言・官民データ活用推進基本計画(2017年5月30日閣議決定)においても、「官民ITS構想・ロードマップ2017」に基づいた取組の推進が掲げられている。これらを踏まえつつ、総務省においては、高度地図データベース(ダイナミックマップ)の更新・配信技術をはじめ、高効率な通信処理技術、緊急時の自動停止・再起動等の高信頼化技術などの自動走行等を支える高精度、高信頼な情報通信技術について、自動走行技術を実装した自律型モビリティシステム(電気自動車、電動車いす等)の早期の社会実装、普及を目指して、研究開発に取り組んでいる(図表3)。
また、自動車だけでなく電動車いすや自律ロボット等の多様な分野における社会実装に向けて、研究開発成果を様々なユーザにとって利用可能なものとするため、スマートIoT推進フォーラム「自律型モビリティプロジェクト」などにおけるユーザからのニーズも踏まえながら、研究開発を引き続き推進していくこととしている。
1 ダイナミックマップ基盤企画株式会社